Levi-Civita(レヴィ-チヴィタ)の完全反対称テンソル\(\epsilon_{ijk}\)は以下のように定義される。
\[
\epsilon_{ijk} = \left\{
\begin{array}{ll}
1 & \mbox{\((i,j,k)\)が\((1,2,3)\)の偶置換} \\
-1 & \mbox{\((i,j,k)\)が\((1,2,3)\)の奇置換} \\
0 & \mbox{上記以外} \\
\end{array}
\right.
\]
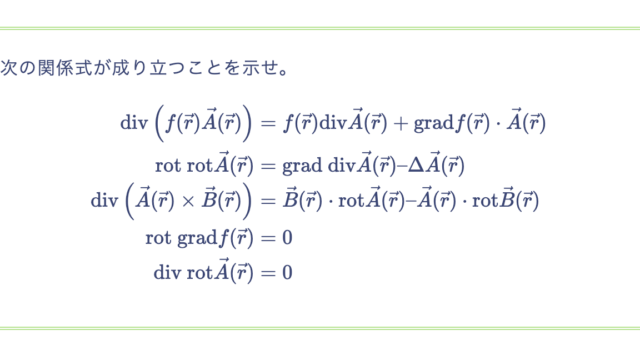
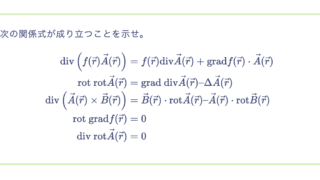
このとき、次の等式が成り立つことを示せ。
\[
\sum_{i = 1}^{3} \epsilon_{ijk} \epsilon_{ilm} = \delta_{j,l} \delta_{k,m} – \delta_{j,m} \delta_{k,l}
\]
ここに、\(\delta_{i,j}\)はKronecker(クロネッカー)のデルタ記号であり、\(i = j\)のとき\(1\)、\(i\neq j\)のとき\(0\)なる値をとる。
これは、Einstein(アインシュタイン)の縮約記号を使えば
\[
\epsilon_{ijk}\epsilon_{ilm} = \delta_{j,l} \delta_{k,m} – \delta_{j,m} \delta_{k,l}
\]
と簡略化して書く事が出来る。
また、Levi-Civita 記号とEinstein の縮約を使えばベクトルの外積とベクトル場の\({\rm rot}\)を以下のように簡潔に書く事が出来ることを示せ。
\[\begin{align}
(\vec{A} \times \vec{B})_{x_i} &= \epsilon_{ijk} A_{x_j} B_{x_k} \\
({\rm rot}\vec{A}(\vec{r}))_{x_i} &= \epsilon_{ijk} \frac{\partial}{\partial x_j} A_{x_k}(\vec{r})
\end{align}\]
ここに、\(x_1 = x, x_2 = y, x_3 = z\)とする。
\[
\sum_{i = 1}^{3} \epsilon_{ijk} \epsilon_{ilm}
\]
の和の中で\(0\)でない項は\((i, j, k)\)が\((1, 2, 3)\)の置換になっていると同時に\((i, l, m)\)も\((1, 2, 3)\)の置換になっている時のみであり、それ以外は全て\(0\)となる。
\((i, j, k)\)と\((i, l, m)\)で\(i\)は共通であるので、\(\epsilon_{ijk}\)と\(\epsilon_{ilm}\)が両方ともに\(0\)とならない場合は
(1) \(j = l, k = m\)
(2) \(j = m, k = l\)
の2つの場合のみである。
(1) の場合には、\((i, j, k)\)と\((i, l, m)\)は両方共に偶置換か、両方共に奇置換であるので、どちらにせよ、その積である\(\epsilon_{ijk} \epsilon_{ilm}\)は\(1\)となる。
(2) の場合には、\((i, j, k)\)と\((i, l, m)\)は片方が偶置換であり、もう片方は奇置換となるので、その積である\(\epsilon_{ijk} \epsilon_{ilm}\)は\(-1\)となる。
従って、
\[
\sum_{i = 1}^{3} \epsilon_{ijk} \epsilon_{ilm} = \delta_{j,l} \delta_{k,m} – \delta_{j,m} \delta_{k,l}
\]
が示された。
二つの3次元ベクトル\(\vec{A}, \vec{B}\)のベクトル積の\(x_1 = x\)成分は
\[
A_{x_2} B_{x_3} – A_{x_3} B_{x_2}
\]
であり、
\[
\epsilon_{1jk}A_{x_j}B_{x_k} = A_{x_2} B_{x_3} – A_{x_3} B_{x_2}
\]
と一致する。\(x_2 = y, x_3 = z\)成分についても同様である。
また、この証明で\(\vec{A}\)と\(\vec{B}\)の成分の順序を変えていないことに注意すれば
\[\begin{align}
\vec{A} &\to \overrightarrow{\nabla} \\
\vec{B} &\to \vec{A}(\vec{r})
\end{align}\]
と置き換えれば、
\[
({\rm rot}\vec{A}(\vec{r}))_{x_i} = \epsilon_{ijk} \frac{\partial}{\partial x_j} A_{x_k}(\vec{r})
\]
も示される。ここに
\[
\overrightarrow{\nabla} = \left(\frac{\partial}{\partial x_1}, \frac{\partial}{\partial x_2}, \frac{\partial}{\partial x_3}\right)
\]
である。