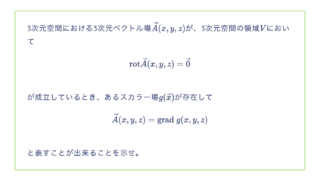
3次元空間におけるベクトル場
を満たすとする。
このとき、あるベクトル場
を満たすことを示せ。
題意を満たすベクトル場
で定義されるベクトル場
実際に
となり、
を満たすことが分かる。
ここで、
を用いた。
3次元空間におけるベクトル場
を満たすとする。
このとき、あるベクトル場
を満たすことを示せ。
題意を満たすベクトル場
で定義されるベクトル場
実際に
となり、
を満たすことが分かる。
ここで、
を用いた。